如何调整 PID 控制器中的设定值?

Written by Paul Cracknell
Updated at April 7th, 2025
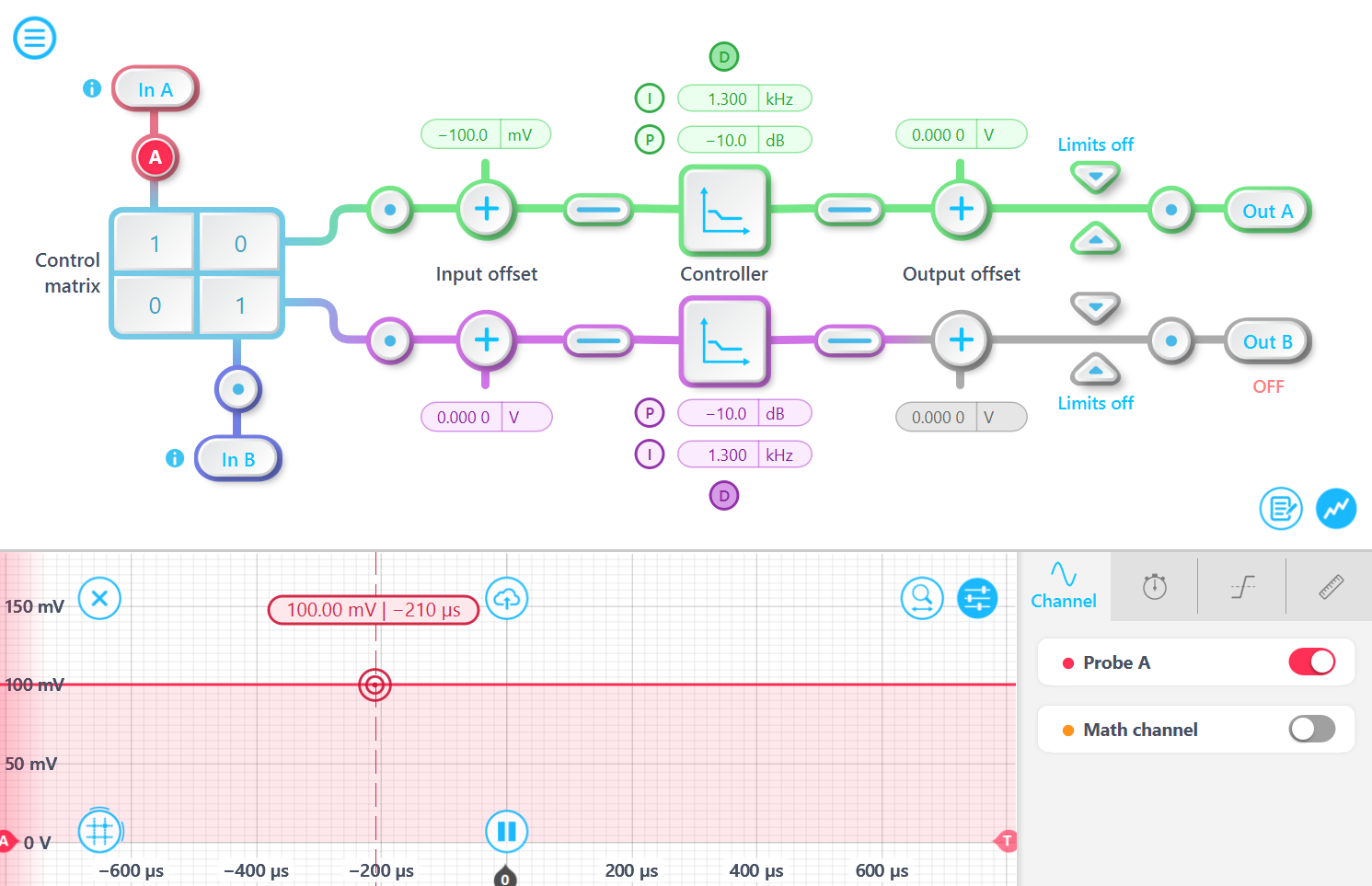
Moku PID 控制器的设定点由输入偏移量控制。误差信号由用户在此处输入的值偏移。这实际上使设定点成为负输入偏移量。
例如,要将输入信号电平控制在 100 mV,则输入偏移量应设置为 -100 mV。这样,当 InA 达到 100 mV 时,PID 控制器的输入信号将为 0。